Import New Map to Virtual Robot Project
In order to add a new map to to the project, you need to open the house_map.launch.py file in the rvrl_gazebo/launch directory.
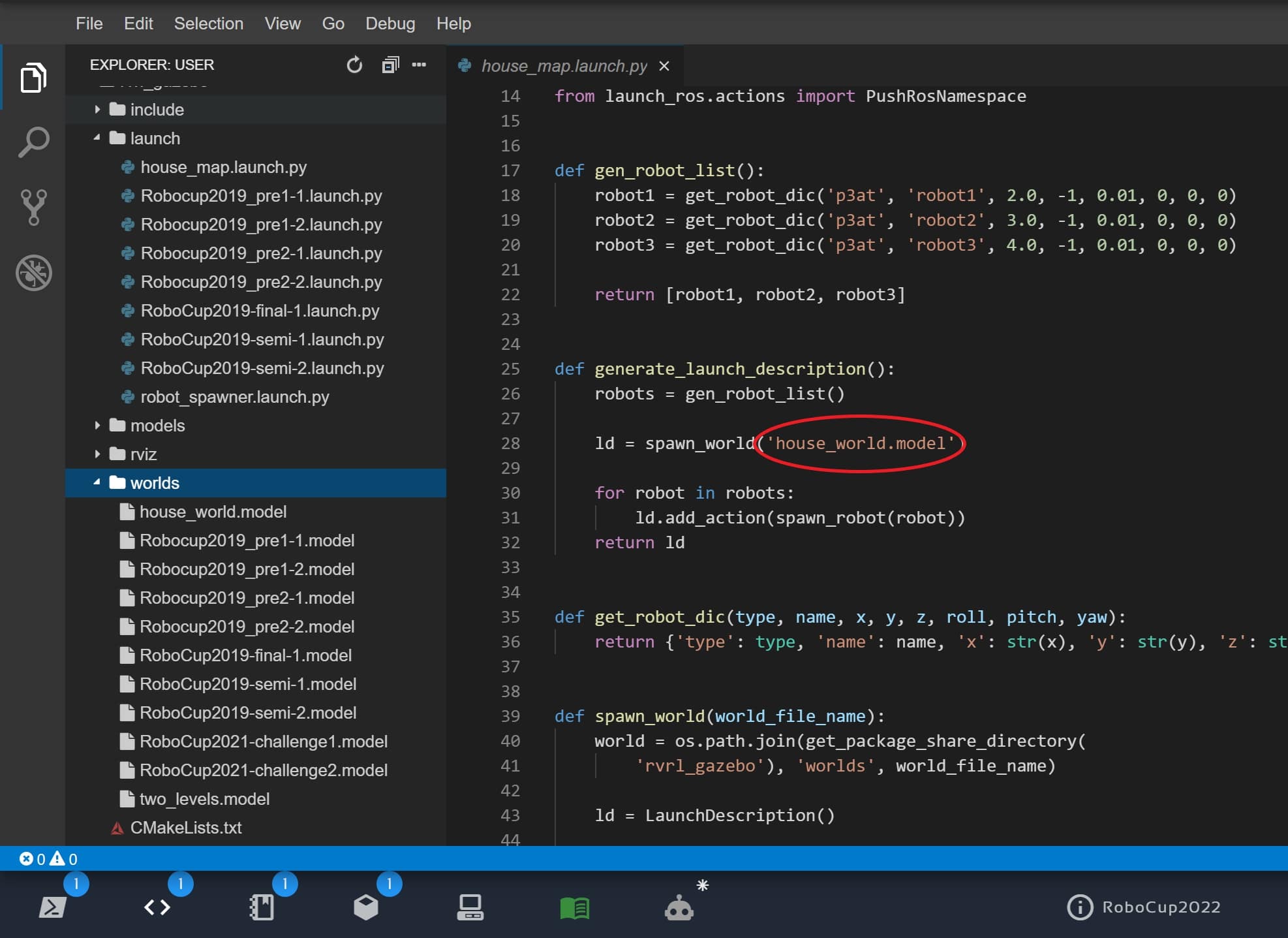
On line 28, change the ‘house_world.model’ to any map you want from the available maps in the directory rvrl_gazebo/worlds.
After that, open the terminal and write the following:
colcon build